Other
ARRIS CM2000 Brushless Gimbal

With many compact brushless gimbal systems hitting the market, I decided to test out the new ARRIS CM2000 brushless GoPro gimbal. The gimbal is available to purchase from hobby-wing for $250 with the purchase of a $50 off coupon. I placed my order with EMS shipping on May 2nd and my order was shipped out on May 10th, arriving to Arizona on May 15th.
The gimbal was packaged in a branded cardboard box protected within another box.

Inside the box the gimbal, CD and strap were loosely packed, but undamaged. A mini USB cable (not included) is required to program the gimbal.

The CD contains the FTDI drivers, SimpleBGC software, PDF manual and a short video clip recorded from the test flight. The test video is matched to the corresponding number labeled on the gimbal and the CD.

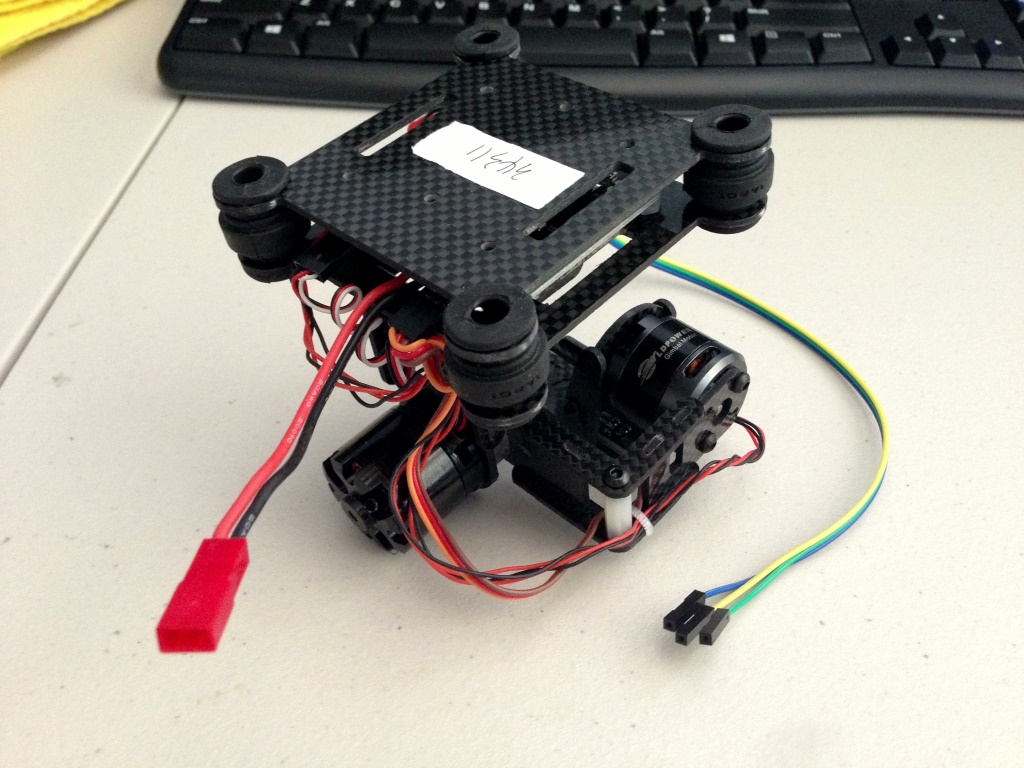
The gimbal and CD are individually numbered to correspond with the test flight footage. Four rubber dampers hold the top and bottom 2mm carbon plates together, protecting the control board and isolating it from vibrations. The power cable uses a JST connector and each motor is wired to the control board with a 3 pin servo cable. The IMU is mounted just beside the GoPro on the base plate, and it is soldered to the control board with several thin-flexible wires. A long signal cable is included to manually control the pitch and roll of the gimbal from a receiver or flight controller. The top plate has two 5mm wide slots seperated 50mm center to center. It also has a centered 40mm square hole pattern with another set of two 40mm spaced holes shifted forward about 5mm from center.
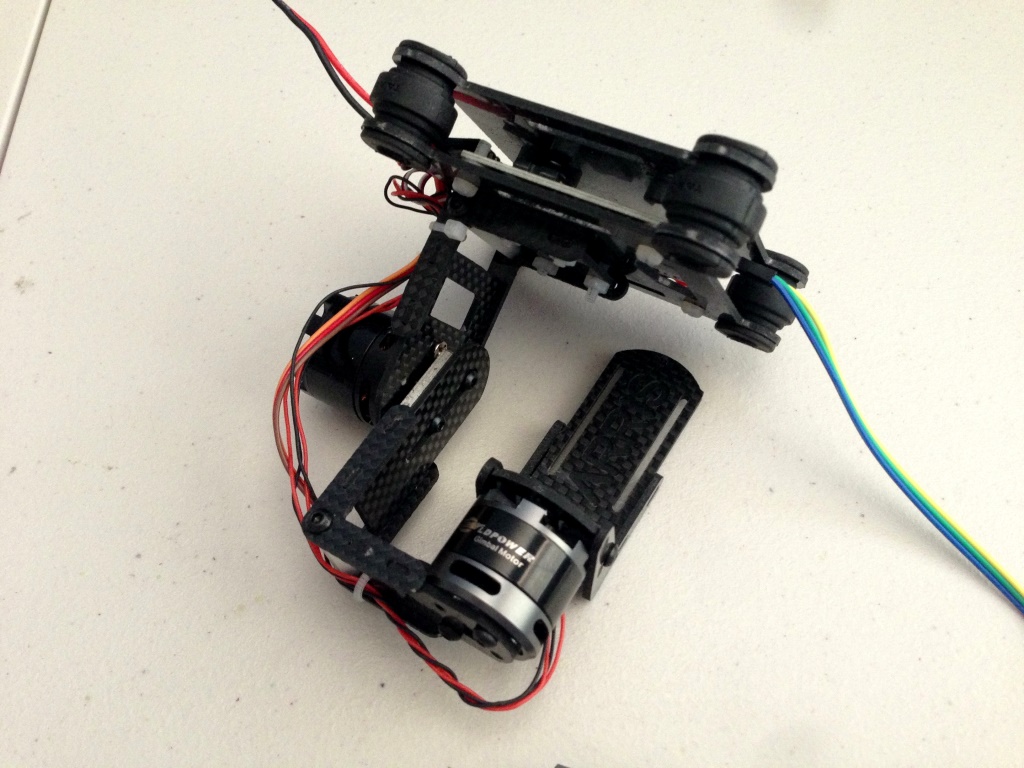
The pitch motor seems to be upgraded from the pictures on the product page. The new motor is slightly larger, but should provide more torque. It appears to be of higher quality than the pitch motor on the product page. The gimbal is assembled primarily with nylon hardware. The bolts appear to be collected from miscellaneous hardware as many of the bolts vary in size or are shortened.
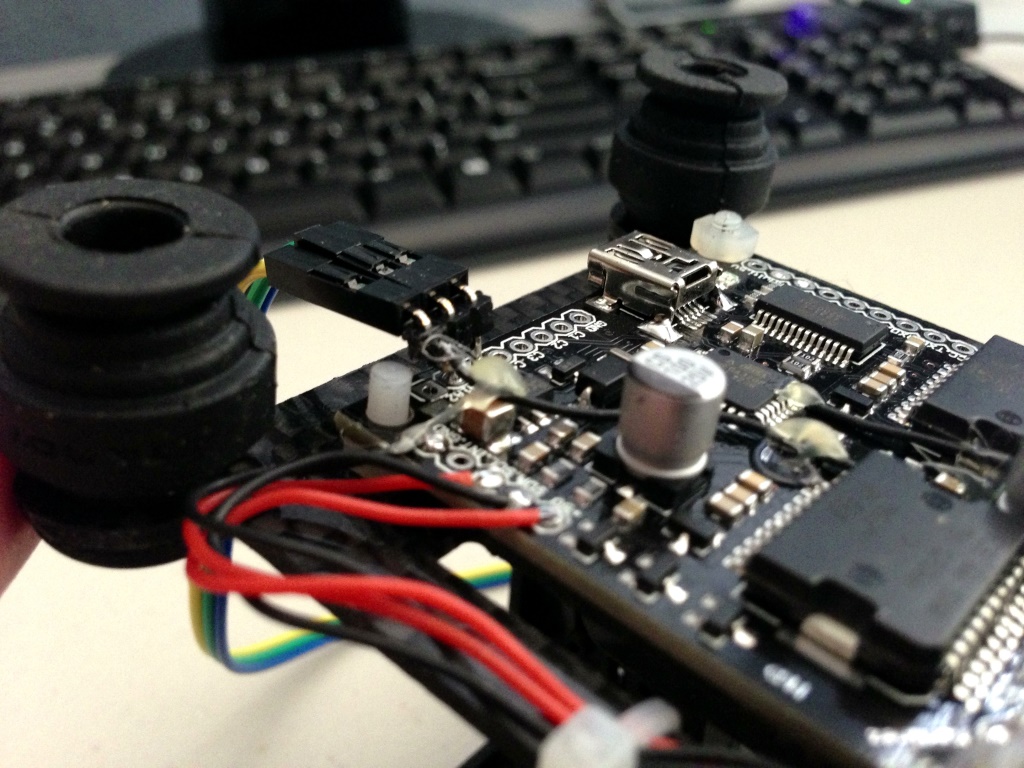
Removing the top plate from the rubber dampers reveals the control board. At the front are the manual control pins and mini USB port. To the left the IMU cables are directly soldered to the board. The motor and power connections are located at the back of the board. Nylon bolts are used at each corner of the control board, but only two of the bolts are secured into place with a nut.
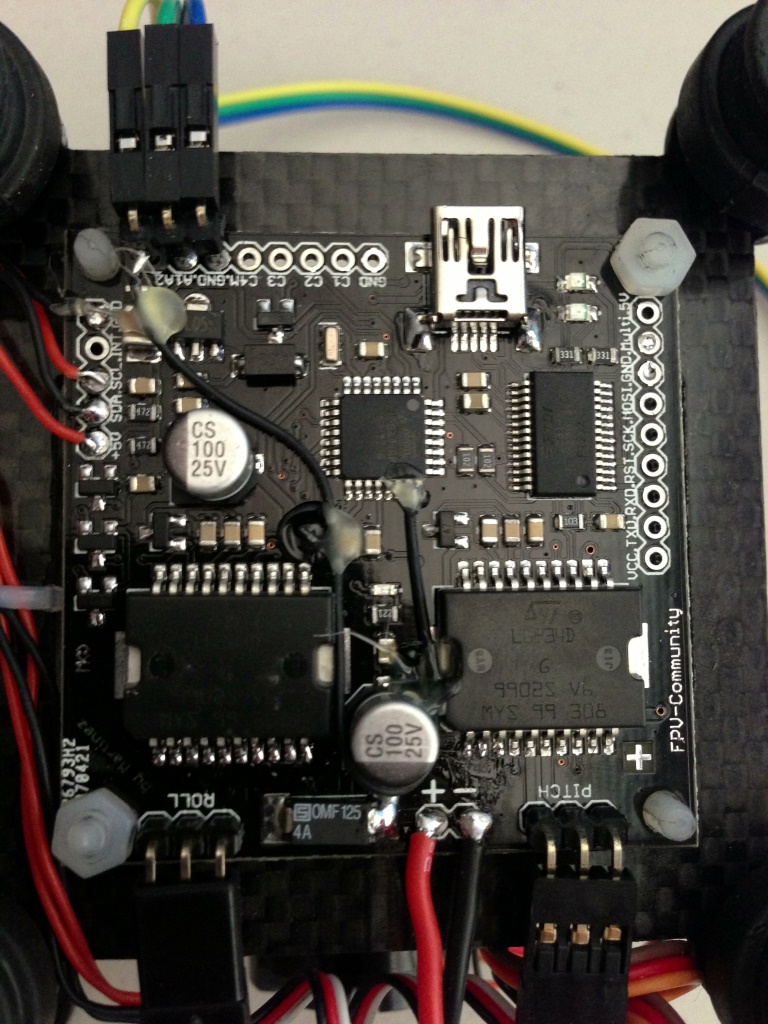
The board I received functions well, but appears to be defective. Judging by the removal of pin A2 from the board and the rerouting of a cable to the micro controller, it would appear that the trace for the manual pitch control was damaged and had to be replaced by a wire This is an intentional design modification. The reason for the addition of this cable is to provide compatibility with the SimpleBGC v1.3 firmware. This firmware is not designed to work with this board, which is why the board is modified by Hobby-Wing for compatibility.
Everything was already setup and functioned quite well after powering up the gimbal for the first time. The original PID settings on my board were as follows:
Roll – P: 24 I: 0.29 D: 11 Power: 83 Poles: 14
Pitch – P: 15 I: 0.32 D: 4 Power: 64 Poles: 16-Inverted
After looking at the motors it would appear that each has 12 poles, so I began by correcting this setting in the software. After experimenting with the software, I ended up modifying the PID settings as follows, however, some additional tuning may still be necessary:
Roll – P: 26 I: 0.32 D: 10 Power: 86 Poles: 12
Pitch – P: 20 I: 0.30 D: 4 Power: 68 Poles: 12-Inverted
Those settings worked for a while, but then I had some oscillations. Now I’m using these settings:
Roll – P: 20 I: 0.32 D: 6 Power: 82 Poles: 12
Pitch – P: 16 I: 0.22 D: 3 Power: 58 Poles: 12-Inverted
For additional tuning and programming information, I recommend consulting the simpleBGC downloads page.
Note: Although this gimbal uses SimpleBGC firmware, it appears that the firmware installed to the board is a “nulled” or pirated firmware. Therefore, it can’t be updated with the latest version of SimpleBGC. I see no indication that Hobby-Wing has purchased the copyrights to this software, however, after having spoken to them they insist that they were unaware of this problem and will consult the supplier of their controllers about this issue. If you would like to donate to the SimpleBGC project contact Aleksey Moskalenko at info@simplebgc.com.
Ultimately, I am very impressed with this gimbal. The gimbal is strong and well constructed. It performs very well compared to a servo gimbal, however, I found that there are some disadvantages to brushless gimbal technology. Brushless gimbals have much less torque than a traditional servo gimbal, therefore, they may begin self-induced oscillations during aggressive maneuvers if not properly tuned or balanced. Since the gimbal must use a feedback system with an IMU to maintain stability, it is vital that all vibrations are removed from the gimbal, but this gimbal’s included dampers do a great job at handling that. The movements are very smooth and can quickly react to disturbances.
Pros:
- Solid construction
- Excellent vibration isolation
- Well balanced and tuned out of the box
- Great attention to the testing and assembly of each product
- Much faster response and smoother operation than a traditional servo gimbal
- Great customer support
Cons:
- Less torque than a traditional servo gimbal
- Motors operate at an audible high frequency
More updates, including flight test videos, will be posted to this page when I finish testing my settings…